
来源:科诺科研
在心血管疾病治疗领域,弯曲血管内的血栓清除一直是一个棘手的挑战。传统的溶栓药物受限于狭窄的治疗窗口和安全隐患,对已形成的血栓效果有限;而机械取栓设备由于采用刚性部件,难以适应复杂的血管几何形状,不仅增加了血管损伤的风险,也阻碍了在弯曲血管中的有效清除。因此,临床急需一种兼具高适应性与强大机械效能的新型介入装置。
为此,大连理工大学李宜副教授、刘军山研究员、吴梦希教授合作,开发了一种四维(4D)可重构血管隧道机(VTM)。该软体机器人灵感源自船蛆(teredo)的钻木机制,能够实现同步的轴向伸长与旋转运动。它由液晶弹性体(LCE)构成,通过远程感应加热驱动,可在20秒内完成重构,且体温仅升高1.1摄氏度。全面的生物相容性测试证实其无细胞毒性、血液相容性良好,并能有效破坏刚度范围从1千帕到1兆帕的血栓模拟物,单次采样体积最高可达7.13立方毫米,为未来血管内介入治疗提供了一个极具潜力的概念验证平台。相关论文以“Four-dimensional reconfigurable vascular tunneling machine of spatially programmed liquid crystal elastomers”为题,发表在Nature Communications上。

研究团队详细阐述了其设计原理与工作机制。该VTM的设计灵感来源于船蛆在木材中钻洞时,通过旋转其坚硬的前壳并同步伸长身体肌肉来实现多方向隧道的独特运动方式。如图1a所示,这一仿生装置能在弯曲的脑动脉内,对血栓进行无创的破坏与采样。其核心功能依赖于液晶弹性体中液晶基元的可编程取向(图1b)。通过一种两步硫醇-丙烯酸酯迈克尔加成-光聚合法,研究人员对液晶弹性体施加了轴向收缩与扭转的机械应力,使液晶基元形成一种耦合的“收缩-扭转”取向。加热至相变温度(45.68摄氏度)以上时,液晶基元有序度被破坏,驱动材料执行程序化的形状变化:同步实现25.7%的伸长和360度的旋转(图1c)。为实现远程控制,VTM表面涂覆了一种由氧化镓铟液态金属和钕铁硼磁性颗粒组成的复合材料,该涂层在感应线圈下可高效产热,从而驱动VTM动作(图1d)。此外,研究团队还设计了两种仿生钻头:实心锥形和带有锚定棘刺的空心锥形结构,以增强其机械破坏和采样能力(图1e)。
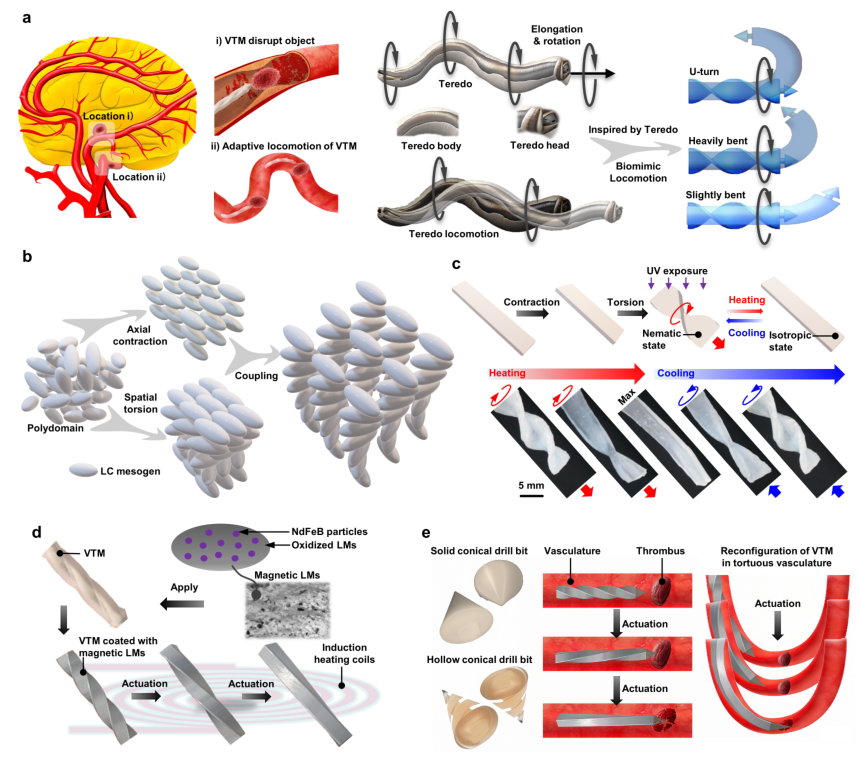
图1. 血管隧道机的设计原理与重构机制。 (a) 受船蛆启发的血管隧道机(浅肉色)在曲折脑动脉(红色)内无创伤地破坏和取样血栓(深红色)的示意图;黑色箭头表示旋转和伸长;右侧蓝色装置为血管隧道机。 (b) 收缩和扭转排列后液晶基元空间取向的示意图。 (c) 血管隧道机中心螺旋形状的编程与稳定化,通过相变温度循环实现可逆重构;浅肉色条带表示液晶弹性体;红色箭头表示伸长和旋转;蓝色箭头表示收缩和反向旋转;max表示血管隧道机达到最大重构状态。 (d) 通过磁性液态金属感应加热实现血管隧道机的远程驱动。 (e) 两种钻头设计,用于增强血管隧道机(银色)在曲折血管(红色)中的破坏和取样能力。
在制造与结构评估方面,研究团队通过系统实验揭示了VTM的形成规律。如图2a所示,制造过程首先将液晶弹性体薄膜单轴拉伸,随后切割成特定尺寸的条带,最后将其两端固定并施加旋转扭矩,在紫外光下锁定形成中心螺旋结构。有限元分析模拟显示,与纯扭转相比,“耦合收缩-扭转”条件下应力会沿轴向集中(图2b-c),偏振光显微镜图像也证实了液晶基元沿轴向形成了这种耦合取向模式(图2d)。通过改变液晶弹性体条带的厚度(t)与宽度(w)比值,研究人员绘制了一张色彩编码的设计表(图2e),用以指导不同螺旋形态(单螺旋或双螺旋)的制造。例如,厚度1毫米、宽度4毫米(t/w=0.25)时,可形成混合螺旋;而固定宽度为5毫米,厚度从1.25毫米增至1.5毫米时,则仅能形成双螺旋(图2f-h)。性能测试表明(图2i),耦合编程的VTM在旋转性能上与纯扭转材料相当,但其轴向伸长率相比纯收缩材料有所降低:单螺旋VTM降低了约10%,双螺旋VTM降低了约20%(图2j),这揭示了螺旋程序对轴向应变的约束作用。
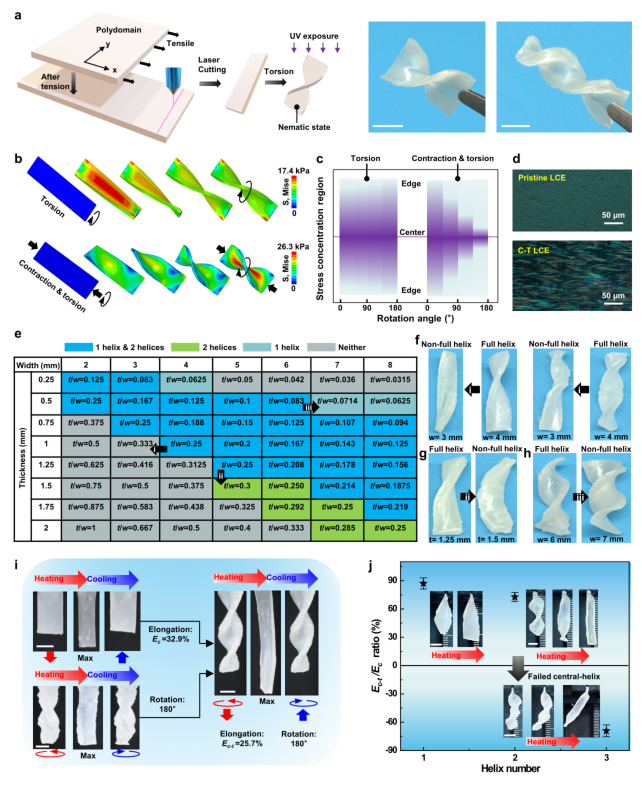
图2. 血管隧道机制造与结构评估。 比例尺:5毫米。 (a) 血管隧道机制造过程示意图,显示液晶基元从多畴向列态排列过程中中心螺旋的形成,以及实验图像展示编程后的血管隧道机;浅肉色薄膜和条带表示液晶弹性体。 (b) 有限元仿真比较血管隧道机在纯旋转与耦合收缩-扭转条件下的应力集中情况。 (c) 示意图显示应力集中区域(紫色)的变化。 (d) 偏光显微镜图像显示液晶基元在采用耦合收缩-扭转排列前后的空间取向。 (e) 彩色编码表指导血管隧道机的设计和制造;t为厚度,w为宽度;黑色箭头表示螺旋形成转变。 (f-h) 代表性案例显示不同宽度和厚度组合下血管隧道机的螺旋形成;黑色箭头表示螺旋形成转变。 (i) 驱动状态下耦合编程液晶弹性体的旋转与纯扭转液晶弹性体相当,但耦合编程液晶弹性体的轴向伸长率有所降低。 (j) 与纯收缩液晶弹性体相比,单螺旋和双螺旋血管隧道机的伸长率分别降低10%和20%;Ec为纯收缩排列后液晶弹性体的伸长率缩写,E_(c-t)为收缩与扭转耦合排列后液晶弹性体的伸长率缩写;max表示血管隧道机达到最大重构状态;红色箭头表示伸长和旋转;蓝色箭头表示收缩和反向旋转;黑色箭头表示收缩排列与扭转排列的组合;黑灰色箭头表示螺旋形成转变失败。类似结果在三个独立实验中重复(d)。数据以均值±标准差表示,点表示均值,误差线表示三个独立样本的标准差(j)。
为实现非接触式远程驱动,研究人员采用了无线感应加热策略。图3a-b比较了不同钕铁硼颗粒含量的液态金属复合材料的加热性能,发现含20%重量比钕铁硼的复合材料在10秒内可升温至90.7摄氏度,效果最佳。在20个加热-冷却循环中,该复合材料性能稳定,温度波动仅1.6摄氏度(图3c),且在一分钟的感应加热内始终保持未熔化状态(图3d)。更重要的是,在模拟脑动脉血流速率下灌注明胶化猪血3小时后,该涂层在血管分叉处未见分层脱落(图3e)。针对热安全性,有限元分析模拟(图3f)与实际流动模型测量(图3g)均证实,VTM在20秒的驱动过程中,血流温度升高仅为1.1摄氏度,且热量分布均匀(补充图S8),远低于人体可耐受范围。
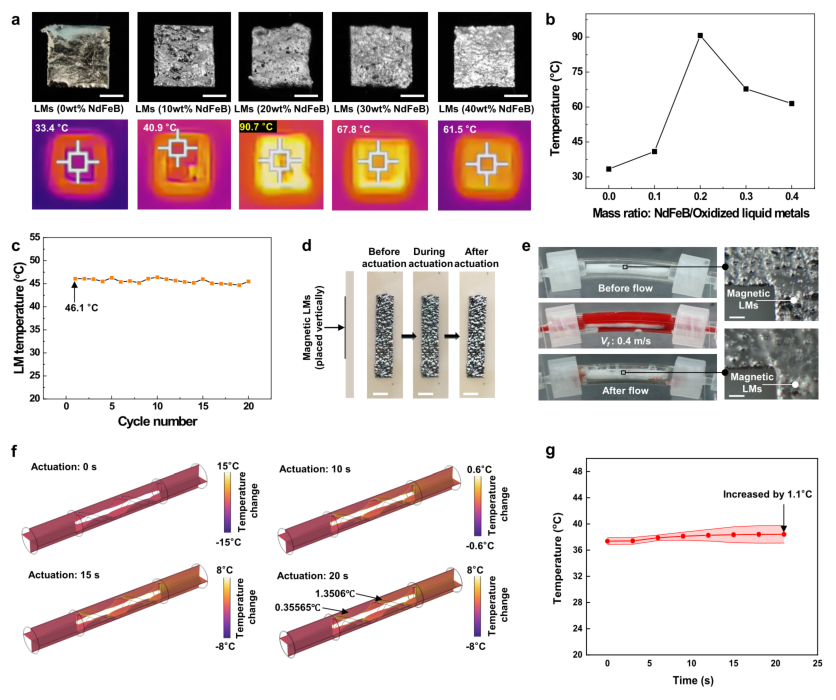
图3. 血管隧道机的远程驱动与性能表征。 (a)和(b) 不同钕铁硼颗粒浓度的磁性液态金属在1100瓦感应加热下的加热性能。比例尺:2毫米。 (c) 含20%钕铁硼颗粒的磁性液态金属在20次加热-冷却循环中的温度变化。 (d) 磁性液态金属(银灰色)在1分钟感应加热下的未熔融演示;黑色箭头表示驱动过程。比例尺:3毫米。 (e) 磁性液态金属涂层的血流(红色)耐久性测试;Vf表示脑动脉流速下的血流。比例尺:150微米。 (f) 血管隧道机在血管管内热扩散的有限元仿真。 (g) 热电偶记录20秒驱动期间血流的温度变化。类似结果在三个独立实验中重复(e)。数据以均值±标准差表示,曲线表示均值,阴影区域表示三个独立样本的标准差(g)。
紧接着,研究团队对VTM进行了全面的生物相容性评估。如图4a所示,与阴性对照组相比,所有经VTM材料浸提液处理的小鼠脑微血管内皮细胞存活率均无显著差异,证明其无细胞毒性。图4b显示,所有VTM样品的溶血率均低于1%,远低于非溶血性生物材料5%的标准。凝血功能测试(图4c)表明,各样品组的活化部分凝血活酶时间、凝血酶原时间和凝血酶时间与对照组相比均无明显差异,说明VTM不干扰凝血通路。最后,血小板黏附实验(图4d及补充图S9)显示,用于驱动的含20%钕铁硼的涂层表面血小板黏附数量极少(每平方厘米少于1×10⁵个),且血小板保持未激活的球形状态,意味着无血栓形成风险。
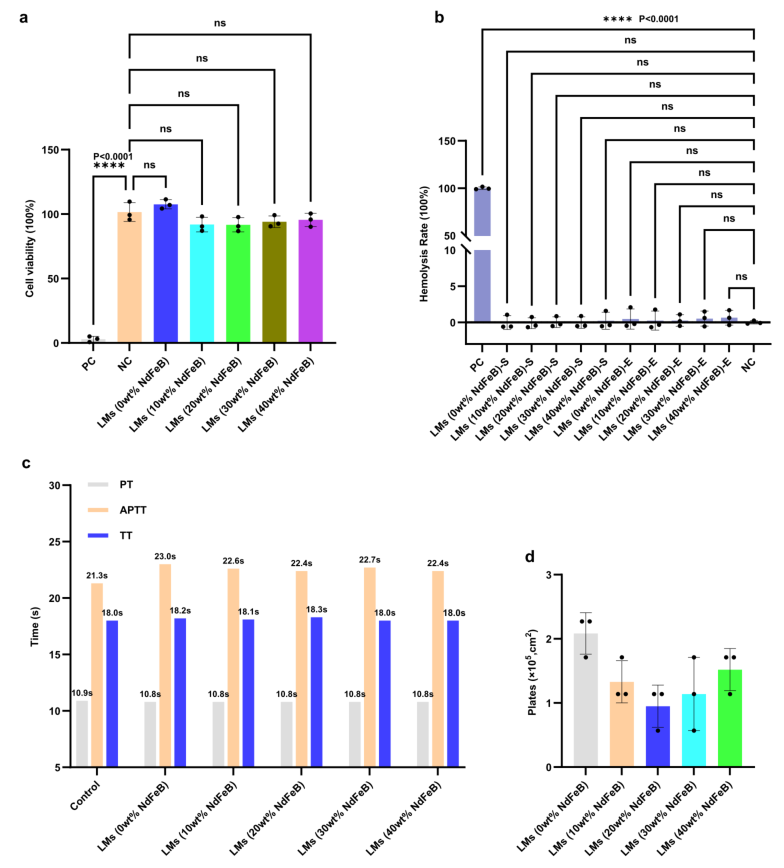
图4. 血管隧道机的生物相容性评估。 (a) 细胞毒性评估。NC为阴性对照(正常培养基),PC为阳性对照(0.2%十二烷基硫酸钠)。 (b) 溶血率。NC为阴性对照(生理盐水),PC为阳性对照(去离子水)。 (c) 抗凝性能,包括凝血酶原时间、活化部分凝血活酶时间和凝血酶时间,NC为正常贫血小板血浆阴性对照。 (d) 涂覆磁性液态金属的液晶弹性体条带上的血小板粘附数量。数据以均值±标准差表示,柱表示均值,误差线表示三个独立样本的标准差(a、b、d)。统计采用单因素方差分析与Dunnett多重比较检验(**** P<0.0001表示有统计学显著性,ns表示无统计学显著性)(a、b)。
在性能验证环节,VTM展现了出色的血栓破坏与采样能力。如图5a所示,研究人员制备了锥形钻头,并用不同硬度(1千帕至1兆帕)的材料模拟血栓。图5b展示了从液晶弹性体编程、液态金属涂层到最终集成钻头的完整制造过程。实验证明,无论是高硬度的血栓模拟物(图5c-i),还是较软的血栓模拟物(图5c-ii),VTM都能稳定地进行机械破坏。图5d的散点图将VTM能够破坏的物体模量与文献中各类真实血栓的模量进行对比,显示其可覆盖所有类型。在受约束的管路内,VTM仍能保持同步旋转与伸长,有效疏通堵塞(图5e)。更令人印象深刻的是,在具有30度、120度和U形弯等复杂弯曲角度的管路中(图5f),VTM依然能平稳导航,同时维持连续的伸长与旋转运动(图5g及补充视频)。为了评估其对血管壁的潜在机械损伤,研究团队测量了VTM在不同约束下的接触力。结果显示,在完全固定两端的最严苛条件下,峰值力为210毫牛顿(图5h);而在更接近实际动态环境的“部分约束”条件下,峰值力降至58.2毫牛顿,接触应力最大为19.4千帕(图5i),这一数值在脑动脉组织的耐受范围之内;在最小约束下甚至无法测得力(图5j),表明其安全性较高。
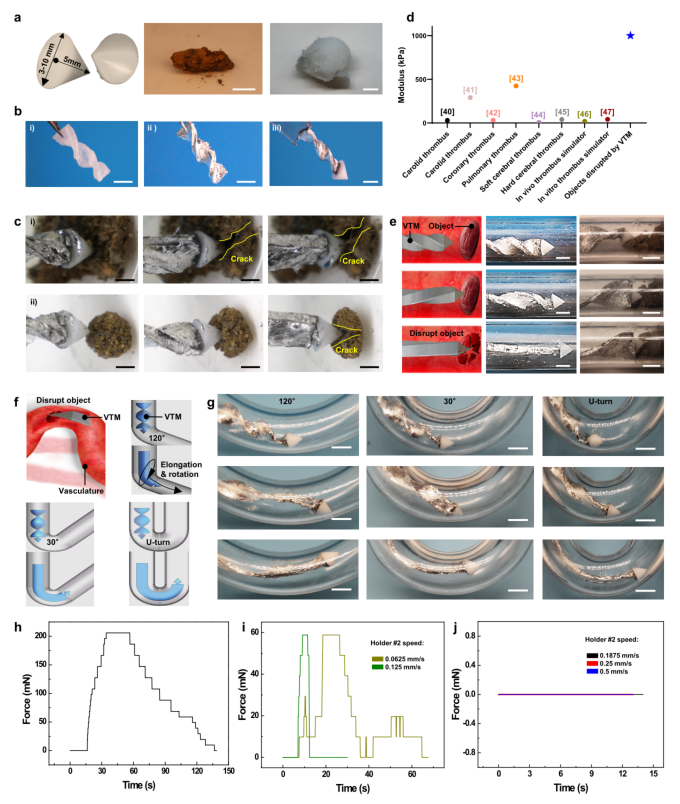
图5. 血管隧道机的血栓破坏性能。 (a) 3D打印锥形钻头及两种弹性模量分别约为1千帕和1兆帕的血栓模拟材料。比例尺:5毫米。 (b) 增强型血管隧道机的制造过程,包括i) 液晶弹性体编程,ii) 涂覆磁性液态金属涂层,iii) 钻头集成。比例尺:5毫米。 (c) (i) 高硬度血栓模拟物(>1000千帕)和(ii) 软血栓模拟物(50千帕)的稳定破坏。比例尺:2毫米。 (d) 散点图显示血管隧道机破坏对象的模量与已报道各种血栓模量的比较。 (e) 血管隧道机在受限管内保持同步旋转和伸长,并完成破坏。比例尺:5毫米。 (f) 血管隧道机在30°、120°弯曲管路和U形转弯中导航时的预测构型示意图。 (g) 血管隧道机在含多个曲率的管路中成功导航,同时保持连续伸长和旋转的实验演示。比例尺:5毫米。 (h) 图S12c中完全约束情况下血管隧道机的接触力曲线。 (i) 图S12c中部分约束情况下血管隧道机的接触力曲线。 (j) 图S12c中最小约束情况下血管隧道机的接触力曲线。
最后,研究团队展示了VTM在实际动脉模型中的采样能力。图6a-b展示了一个完整的可逆重构周期:VTM通过伸长和旋转钻入血栓模拟物,然后通过反向运动将其快速破坏并取样。对于不同模量的人工血栓,VTM(钻头基部直径5毫米)在单次采样周期中可获取1.93至7.13立方毫米的组织(图6c),且首次采样效率最高。在一个高度弯曲的脑动脉模型中(曲率大于0.3每毫米),VTM能够自适应地伸长和旋转,并在两个代表性位置(位置1和位置2)实现了精准、有效的血栓破坏与采样(图6d-f及补充视频)。整个过程结束后,VTM可顺利撤回并反旋至原始构型,动脉管壁上未见液态金属残留,确保了原位干预的同时避免了对组织的附带损伤。
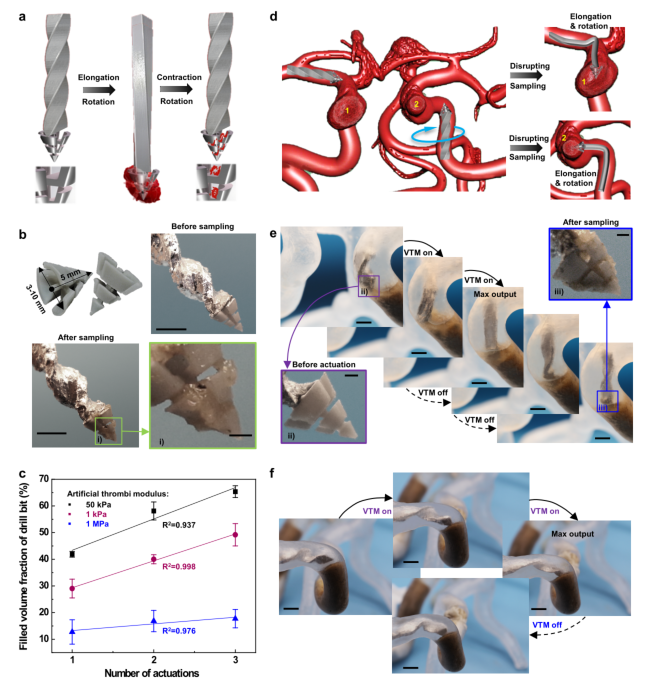
图6. 血管隧道机的取样性能。 (a) 血管隧道机通过可逆伸长和旋转进行样本回收的示意图;红色凝块表示血栓;灰色装置表示血管隧道机。 (b) 血管隧道机在一次可逆重构周期内成功完成血栓模拟物的快速破坏和取样。比例尺:5毫米。 (c) 三种不同人工血栓在三个驱动周期内的取样体积。 (d) 血管隧道机在高曲折动脉内自适应伸长和旋转;红色区域表示脑动脉;灰色装置表示血管隧道机。 (e、f) 在(d)中两个代表性位置进行精确破坏和取样。比例尺:3毫米。数据以均值±标准差表示,点表示均值,误差线表示三个独立样本的标准差(c)。
综上所述,这项研究成功开发了一种基于液晶弹性体的4D可重构血管隧道机,通过模仿船蛆的生物力学机制,巧妙地解决了软体机器人在受限空间中既要保持柔顺性又要产生足够机械力的矛盾。该系统集成了可编程的4D重构、远程安全驱动与验证的生物相容性,为用于血管内介入等受限环境操作的液晶弹性体驱动器提供了一个从基础机制到功能验证的完整框架。展望未来,该平台有望通过集成传感功能进一步演进,最终发展成为具有临床应用前景的血管内介入机器人。
专注期刊投稿、发表十年,任何投稿、写作难题欢迎咨询!

PAPER INFORMATION

快速预审、投刊前指导、专业学术评审,对文章进行评价

校对编辑、深度润色,让稿 件符合学术规范,格式体例等标准
.png)
适用于语句和结构尚需完善和调整的中文文章,确保稿件达到要求
.png)
数据库包括: 期刊、文书籍、会议、预印章、书、百科全书和摘要等
让作者在期刊选择时避免走弯路,缩短稿件被接收的周期
根据目标期刊格式要求对作者文章进行全面的格式修改和调整
帮助作者将稿件提交至目标期刊投稿系统,降低退稿或拒稿率
按照您提供的稿件内容,指导完成投稿附信(cover letter)







北京总部:北京市海淀区碧桐园 3 号楼 2 层 211 广州办事处:广州市黄埔区科学城国际企业孵化器 E栋306 联系人:客服 / 18163670350
Copyright © 2022-2024 北京特诺科技有限公司 版权所有 备案/许可证编号为: 京 ICP 备 2023007944 号
