在从日常系鞋带到精密手术再到先进机器人操作的世界里,一个被忽视已久的问题正在悄悄限制着技术的发展:机械力如何被精准传递和控制。现代医疗器械、机器人系统普遍依赖电子传感与反馈,但在空间受限的微创手术、资源匮乏的野外救援等场景中,电子设备往往难以部署、成本高且存在可靠性隐患 。尤其在外科手术中,医生通常只能依靠“感觉”和组织变形来判断缝合力度,缺乏量化依据,而缝线过紧会导致缺血坏死、过松又可能造成渗漏,这一长期困境迫切需要全新的解决思路。在此,浙江大学杨卫院士、蔡秀军教授、杨栩旭副研究员、陈鸣宇副研究员和李铁风教授合作,提出了一个令人意想不到的答案:利用“滑结”(slipknot)来编码与传递力。研究显示,通过精确设计与预拉紧,一个普通的滑结竟能以超过 95% 的一致性输出机械信号,使得复杂操作无需电子传感器也能实现智能化。这种“打结传递信息”的策略不仅帮助年轻外科医生将缝合精度提升 121%,还能改善动物手术后的组织愈合;同时,它还能赋能机器人,在无力传感器的情况下实现实时、可靠的力控制。一个小小的结,被团队变成了跨越人类与机器的“机械智能接口”。相关成果以“Slipknot-gauged mechanical transmission and robotic operation”为题发表在《Nature》上,Yaoting Xue, Jiasheng Cao, Tao Feng, Kaihang Zhang为共同第一作者。
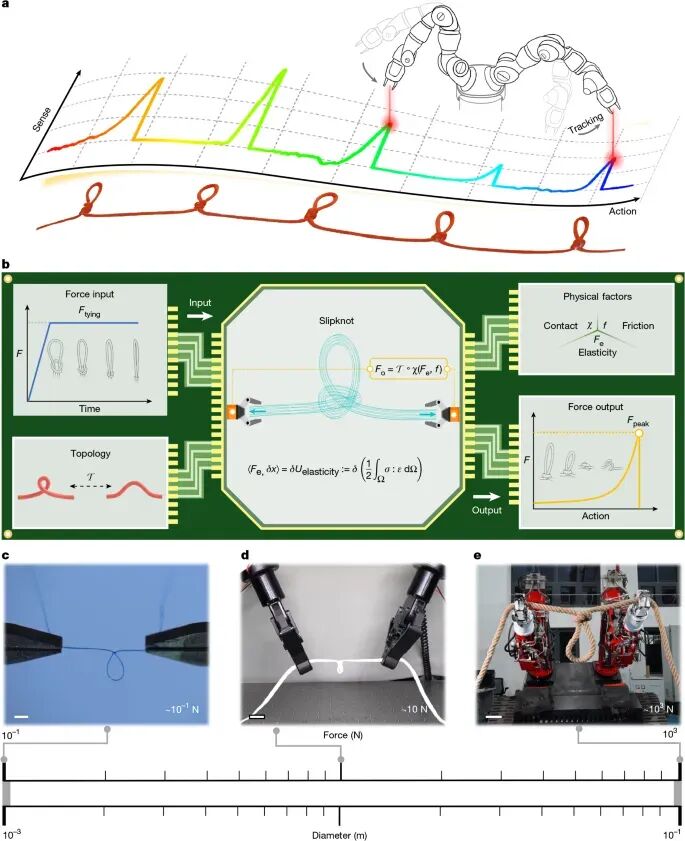
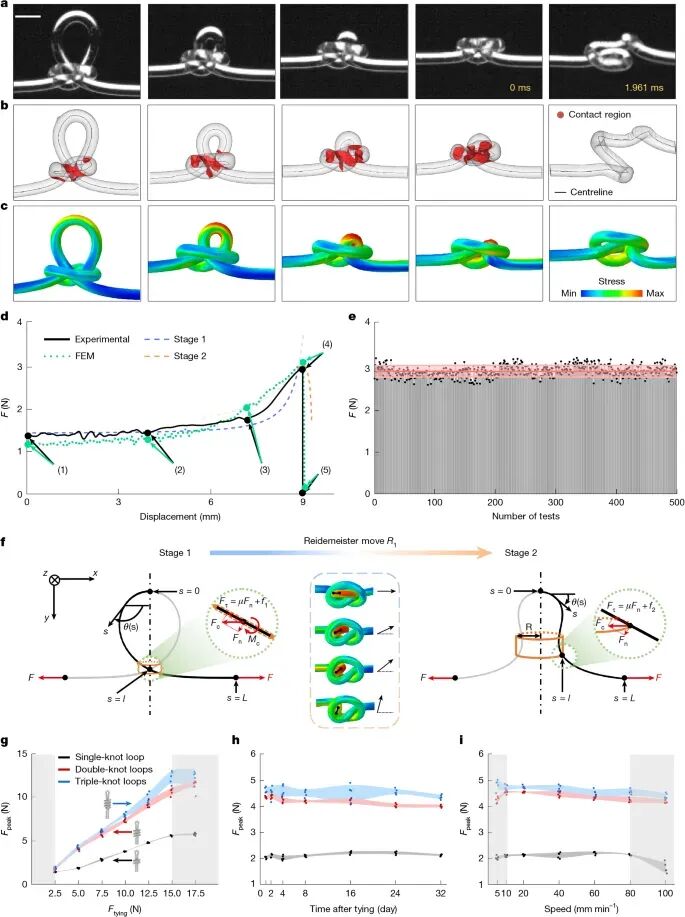
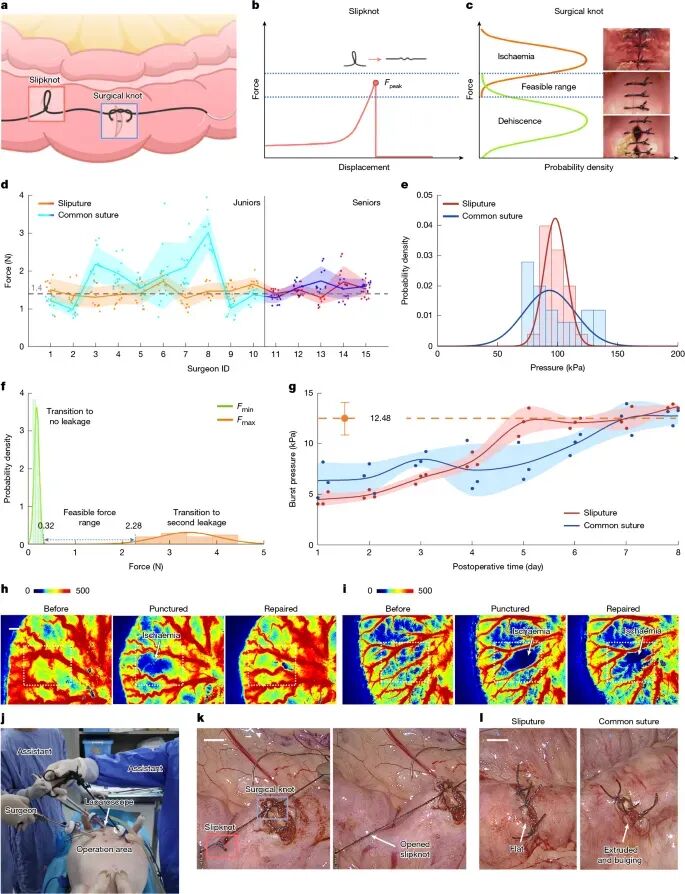
在图1a中,作者展示了由多个滑结串联构成的机械信息传输示意:每一个结都像一个“力字符”,在被拉开时释放一个独特的峰值信号,机器人手臂因此能像读光栅一样获取逐次的机械信息 。图1b更直观演示了写入与读取的全过程:首先用设定好的力Ftying 打结(写入),随后通过再次拉扯让结按拓扑保持移动并最终打开(读取)。在这个过程中,接触界面、摩擦系数与弹性变形共同塑造了最终的 Fpeak。图1c–e中,滑结的稳定性与一致性被分别在微操作、协作机械臂和重载实验中验证。无论是毫米尺度的微操作(图1c)还是数十公斤的救援场景(图1e),滑结都能精准地传递力信号,仿佛有了一个极其可靠的“机械密码”。机械系统因此获得了天然的力限制与力反馈能力,不依赖任何电子器件。图1: slipknot 写入/读取力信息的原理与多场景验证图2a–c用高速摄影与 micro-CT 清晰记录了 滑结被拉开前的逐帧变化:随着外力增加,结的滑动圈逐渐收紧、应力集中加剧,最终在临界点发生拓扑的 Reidemeister R1 变换(图2a 中间)。这一瞬间正是 Fpeak 产生的物理来源。图2d展示了实验与模型高度吻合的力-位移曲线:长时间的稳定拉伸后,力突然上升到峰值,紧接着快速下降,仿佛“啪”地一声弹开。图2e进一步展示了 500 次重复测试中 Fpeak 的高度一致性(均值约 2.945 N,标准差仅 0.135 N),这是滑结成为“力单位”的关键。图2f–i 从理论模型、结圈数量、材料直径、存放时间和拉伸速度等方面验证了 slipknot 的可调性和稳定性。通过改变 滑动环(knot loop)数或材料直径,Fpeak 可被像调阻值一样精准设定;即便放置 32 天或在不同速度下拉开,滑结仍保持稳定输出。这意味着,一个滑结就是一枚可编程、可储存、可长时间保存的“力脉冲发生器”。图2:滑结的力学演化、拓扑突变与 Fpeak 稳定性来源图3a–c 提出了革命性的概念滑结缝线(sliputure):在普通缝线末端串联一个滑结,使其在被拉开时输出预设的 Fpeak,强制确保外科“打结力”处于安全范围。对于外科医生来说仍然是原有的打结方式,只是最后的拉紧步骤被 slipknot 自动校准力值。图3d的实测结果极其醒目:年轻医生在使用普通缝线时力控制离散度很大,而换成滑结缝线后,其打结力精度不仅大幅提升,还达到了与资深外科医生几乎相同的水平,提升幅度高达 121%。而资深医生使用滑结缝线后则保持稳定,不需要额外学习。图3e–l 展示了 滑结缝线在动物模型中的实际效果。根据图3f,研究团队通过实验确定了大鼠结肠修复的最佳缝合力区间(0.32–2.28 N),并将 Fpeak 定为 1.3 N。图3g 的破裂压力结果显示,使用 sliputure 修复的结肠在术后第 5 天便达到健康水平,比传统缝线快整整两天。图3h–i 的 LSCI 血流成像显示,滑结缝线缝合后组织血供恢复更好,渗漏与粘连也明显减少(图3j–l)。在腹腔镜实际操作中,滑结缝线依然能清晰提供力信号,帮助医生避免过度拉扯。图3: 滑结缝线提高手术缝合精度并改善动物组织愈合的实验结果在图4a,研究团队构建了一个视觉检测系统,能实时识别滑结的几何变化并判断结是否打开。也就是说,机器人无需力传感器,只要“看到”结弹开,就能瞬间停止动作。图4b–c 的猪结肠机器人缝合实验显示:使用滑结缝线的缝合效果平整、无挤压,相比之下普通缝合常出现组织鼓起和变形。图4d–e 展示了机器人在检测到滑结打开后立即制动的自动刹车系统,使得机器人具备“天生的安全限制器”。更令人惊喜的是,图4g–h 中,研究团队还把滑结植入到肌腱驱动机器人手臂的拉索中,一旦外力过大,结会自动打开,相当于机械保险丝,让机器人在与人类互动或意外碰撞时具备天然的“柔顺安全机制”。图4: 结合机器视觉与机械臂,实现机器人力控制与安全防护的系统展示这项工作从一个看似普通的滑结出发,将其发展为一种可量化、可编程、跨场景的机械智能传输机制。它不依赖电子元件,不需要复杂硬件,成本极低却能提供高度精确的力控制。滑结缝线让手术更安全、更一致,也为经验不足的医生提供了即时的力校准工具;在机器人领域,slipknot 则成为可嵌入可视系统、驱动系统的天然“力限位单元”,将自动化从“看得见”推进到“摸得准”。未来,这种基于结的机械智能还可能被推广到软体机器人、极端环境作业、教育培训乃至可穿戴设备中。甚至在纳米尺度,DNA 的滑结行为也预示着跨维度的应用潜力。一个小小的结,正在悄然开启机械信息传递的新纪元。专注期刊投稿、发表十年,任何投稿、写作难题欢迎咨询!





.png)
.png)







