
来源:科诺科研
针对上述挑战,中国科学技术大学冯伟教授、吴恒安教授、盛书荣团队开发了一种基于低共熔凝胶(eutectogel)的智能粘附系统。该系统通过电热驱动的可切换粘附与无线传感能力相结合,实现了对粘附力的原位监测。研究团队通过力学分析和分子层面表征系统阐明了粘附切换机制,并借助机器学习辅助的粘附传感技术,实现了动态抓取和 locomotion 功能,为下一代智能粘附界面提供了兼具自适应性和自感知能力的新路径。相关论文以“Switchable adhesion of phase-transition eutectogels with integrated machine learning-enhanced intelligent adhesion sensing”为题,发表在Nature Communications上。
研究团队设计的可结晶低共熔凝胶由聚合物网络和深共晶溶剂(DES)组成。通过精确调控尿素与氯化胆碱的摩尔比(最终优选为1:1.5),材料的熔点可在环境条件范围内调节。如图1所示,该凝胶具有温度响应的相变特性:在低温(20°C)下呈不透明的结晶态,刚度达10¹ kPa量级;加热至70°C后转变为透明无定形态,模量降至10² kPa。在从熔融态冷却至结晶态(M2C)的过程中,粘附强度可在10² kPa至10³ kPa范围内调控。偏振光显微镜观察证实了凝胶内部可逆的针状结晶与熔融过程。这一相变驱动的粘附切换赋予了低共熔凝胶多种功能:按需拾取与释放物体、粘附状态智能感知以及爬壁机器人应用。
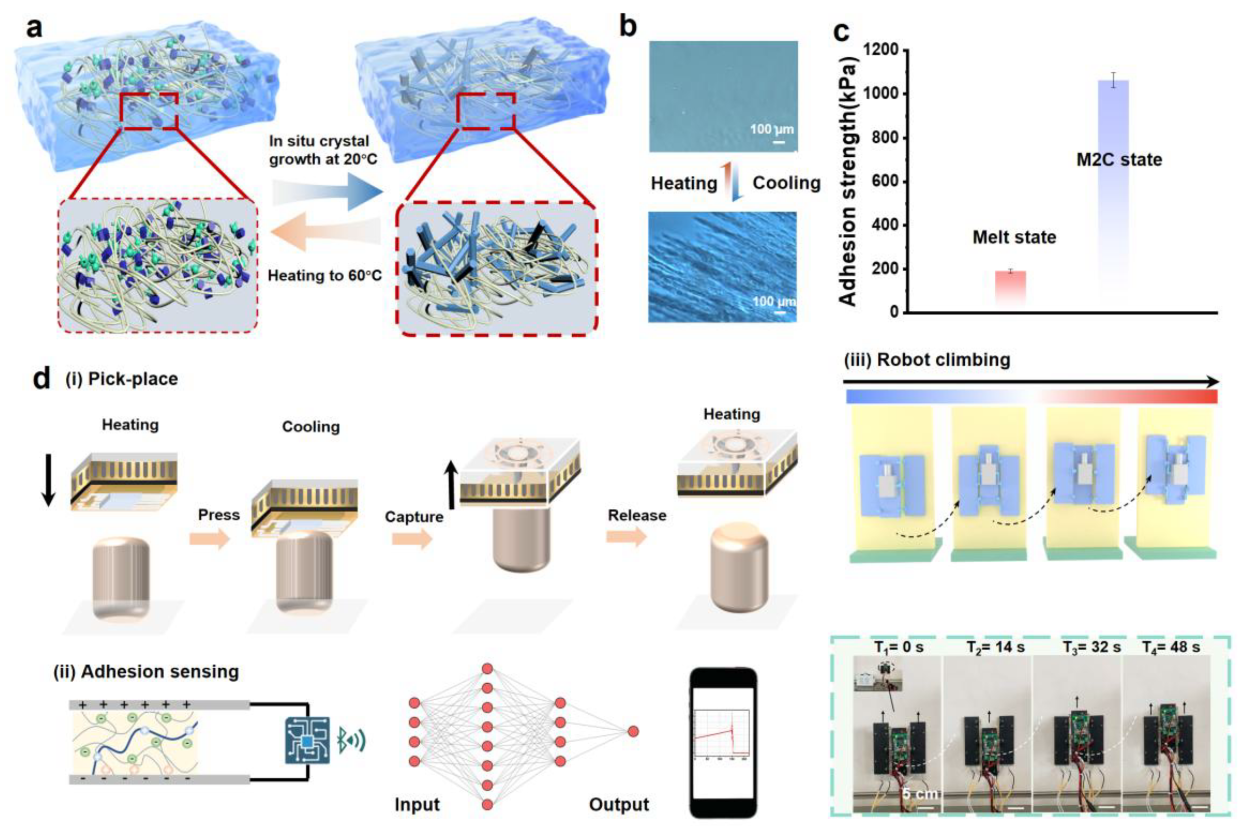
图1 | 低共熔凝胶的特性与应用概述。 (a) 低共熔凝胶温度介导的结晶-熔融相变示意图。 (b) 显示低共熔凝胶内部可逆结晶和熔融过程的显微图像。 (c) 低共熔凝胶的可切换粘附性能,显示熔融态到结晶态(M2C)相比熔融态具有更强的粘附。数据以均值±标准差表示(n=3个独立样本)。 (d) 自感知和可切换粘附低共熔凝胶的演示与功能。(i) 通过加热和冷却实现物体的拾取和放置操作。(ii) 通过电信号和机器学习实现的粘附状态智能感知。(iii) 利用低共熔凝胶可切换粘附的爬壁机器人。比例尺,5 cm。
图2展示了材料的系统表征结果。低共熔凝胶EG₁.₃₀在20°C时呈现不透明、结晶、刚性状态,在70°C时变为透明、无定形、柔软状态。随着氯化胆碱含量增加,熔点升高;XRD图谱证实结晶态具有明显的结晶峰,而无定形态则为宽弥散峰。在20°C至80°C温度循环中,结晶态凝胶的透光率从3.8%可逆切换至约90%。力学测试表明:结晶态拉伸断裂强度超过1 MPa(无定形态仅0.2 MPa),模量从0.108 MPa增至3.234 MPa,韧性从2.196 MJ/m³提升至10.62 MJ/m³。通过调节单体含量(HEAA从25 wt%增至45 wt%),拉伸强度可从0.15 MPa提升至4.8 MPa。此外,该凝胶还具有温度介导的形状记忆特性——在结晶态可固定形变,加热后恢复原始形态。
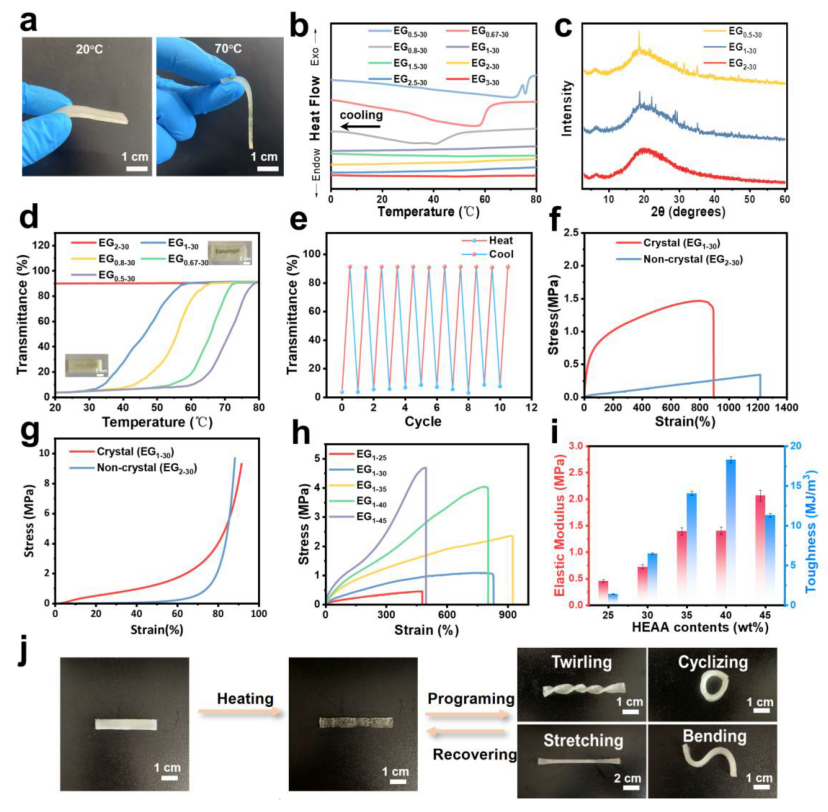
图2 | 低共熔凝胶的材料表征。 (a) 低共熔凝胶EG₁.₃₀在不同温度下的数码照片,显示低温(20°C)下不透明、结晶、刚性状态,以及高温(70°C)下透明、无定形、柔软状态。 (b) 熔点与DES组成的关系。熔点随氯化胆碱含量增加而升高。 (c) 结晶态与无定形态低共熔凝胶的XRD图谱。 (d) 不同摩尔比下低共熔凝胶在温度影响下的透光率变化。比例尺,2 cm。 (e) 结晶态低共熔凝胶EG₁.₃₀在20°C-80°C温度循环下的透光率变化。 (f) 结晶态与无定形态低共熔凝胶的拉伸性能比较。 (g) 结晶态与无定形态低共熔凝胶的压缩性能比较。 (h) 单体含量对低共熔凝胶拉伸性能的影响。 (i) 不同单体含量下低共熔凝胶的模量和韧性。数据以均值±标准差表示(n=3个独立样本)。 (j) 结晶态低共熔凝胶EG₁.₃₀的温度介导形状记忆特性。
粘附机理研究如图3所示。低共熔凝胶在熔融态时柔软且高度贴合,能够适应粗糙表面形貌;冷却结晶后凝胶“锁定”在基底形貌中,形成M2C粘附机制;重新加热至熔融态则粘附显著减弱。在优化比例EG₀.₆₇₋₃₀下,M2C粘附强度最高达1.06 MPa。在预载50 kPa条件下,粘附-预载比达到约25,超过传统干粘附和仿生结构粘附剂。在不同基底(塑料、有机玻璃、木材、金属等)上,M2C粘附均达到约1 MPa,而熔融态粘附降低一个数量级,结晶态因刚性和低贴合性再降低一个数量级。分子动力学模拟显示,M2C粘附的峰值力和断裂功均显著高于常规粘附,界面氢键数量在M2C状态下也明显增多。理论模型与实验结果吻合良好,验证了“熔融态高贴合-结晶态刚性锁固”的协同增强机制。
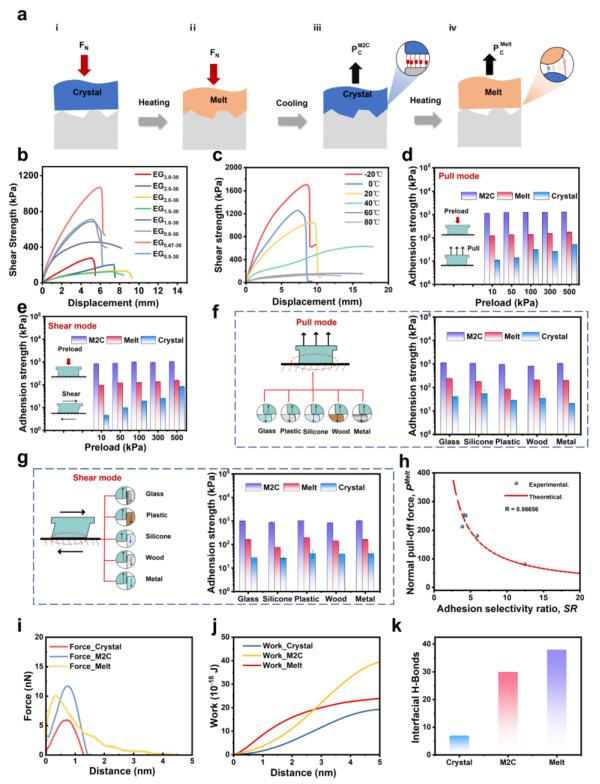
图3 | 低共熔凝胶中结晶增强粘附的机理。 (a) 低共熔凝胶在粗糙表面上结晶态(C)、熔融态(M)和熔融-结晶态(M2C)粘附的示意图。 (b) 不同溶剂比对低共熔凝胶粘附性能的影响。 (c) 温度对低共熔凝胶EG₀.₆₇₋₃₀在剪切粘附测试模式下粘附性能的影响。 (d-e) 预载对拉伸(上)和剪切(下)模式下粘附强度的影响(在光滑玻璃上测量,长宽比=1)。熔融态和熔融-结晶态在较小预载压力(100 kPa)下达到粘附平衡,而结晶态难以平衡(样品信息:EG₀.₆₇₋₃₀)。 (f-g) 低共熔凝胶EG₀.₆₇₋₃₀在不同基底上拉伸(上)和剪切(下)模式下的粘附强度(长宽比=1,预载=200 kPa)。包括高M2C粘附、低熔融粘附和极小结晶粘附在内的粘附特性在不同基底上保持一致。 (h) 粘附选择性比作为法向拉脱力的函数。 (i) 低共熔凝胶在结晶、熔融和M2C状态下粘附过程中的分子动力学模拟力条件。 (j) 低共熔凝胶在结晶、熔融和M2C状态下粘附过程中的断裂功。M2C粘附过程中释放粘附所需的力和断裂功显著大于熔融和结晶粘附过程。 (k) 低共熔凝胶EG₀.₆₇₋₃₀与SiO₂基底在结晶、熔融和M2C状态下界面氢键数量(通过分子动力学模拟计算)。
研究团队进一步利用低共熔凝胶的本征离子导电性实现了粘附状态的实时无线监测。如图4所示,将低共熔凝胶夹于双层不锈钢板之间形成超级电容器结构。在拉伸加载过程中,电容随界面距离增大而减小,电阻随内部损伤增加而上升;在剪切模式下呈现类似趋势。研究团队开发了基于STM32微控制器的蓝牙传输系统,并在-20°C至80°C共37个温度条件下采集了粘附和脱粘过程的动态电信号。采用轻量级全连接神经网络进行训练后,模型在7407个测试样本上达到96.10%的准确率,召回率达96.39%,能够提前1秒预测粘附失效。
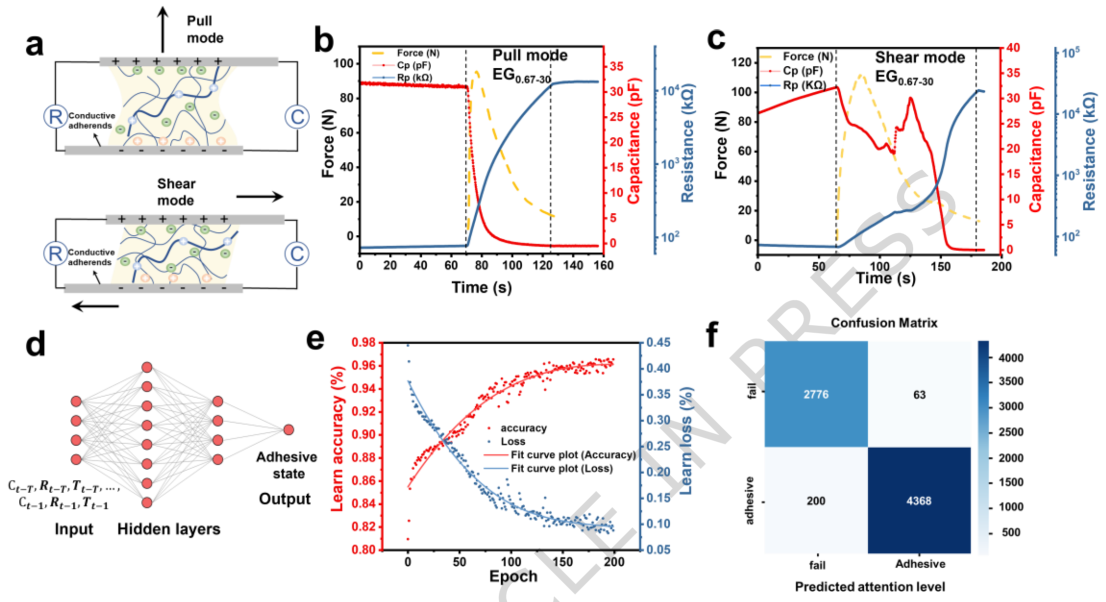
图4 | 粘附状态的智能感知。 (a) 由低共熔凝胶和双层不锈钢金属片构建的智能感知粘附示意图。 (b) M2C态低共熔凝胶EG₀.₆₇₋₃₀在拉伸加载下对金属表面的粘附,以及相应的电容和电阻变化。纵轴力表示用于模拟改变粘附状态所需外力的施加拉脱力,从而实现粘附状态变化的监测。 (c) M2C态低共熔凝胶在剪切模式下金属表面之间的施加剪切力以及相应的电容/电阻变化。 (d) 机器学习算法模型图。 (e) 多个训练周期上的学习准确率和F1分数。 (f) 使用低共熔凝胶EG₀.₆₇₋₃₀的对应预测混淆矩阵。
基于上述特性,研究团队开发了智能粘附抓取器(图5)。抓取器采用2 mm厚低共熔凝胶层配合温控单元(20°C至70°C快速循环)。在熔融态建立紧密接触,冷却结晶后机械锁定界面实现稳定抓取,重新加热则降低粘附实现重力辅助释放。电信号监测显示:抓取目标时电容信号显著增加、电阻信号下降;释放时电容下降、电阻上升。该抓取器可抓取金属块、金属球、PTFE空心圆柱、木框、玻璃杯、玻璃球、图钉、多孔海绵、鸡蛋等不同材质和形状的物体,M2C态下最大可抓取4 kg重物。一次完整的拾取-释放循环(2×30秒)能耗约为600 J。
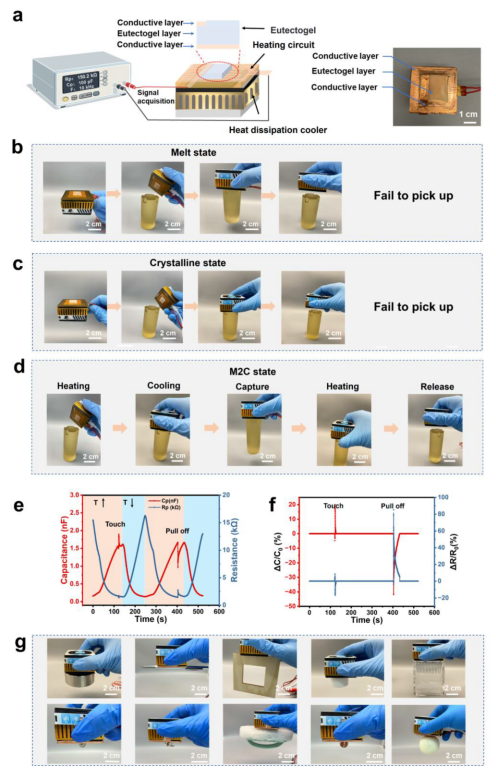
图5 | 基于结晶态低共熔凝胶的智能粘附抓取器研发。 (a) 基于低共熔凝胶的智能粘附抓取器结构示意图和照片。 (b) 熔融态的低共熔凝胶智能抓取器在提起过程中倾向于失去对目标物体的粘附。 (c) 结晶态的低共熔凝胶抓取器难以通过粘附抓取目标物体。 (d) 使用基于M2C过程的低共熔凝胶(EG₀.₆₇₋₃₀)智能抓取器拾取目标物体的过程数码照片。 (e) 低共熔凝胶(EG₀.₆₇₋₃₀)智能抓取器抓取目标物体过程中的电信号变化。 (f) 信号解耦后,智能抓取器抓取和释放目标物体时电信号显示出明显的波动。 (g) 低共熔凝胶(EG₀.₆₇₋₃₀)智能抓取器能够抓取不同材料制成的各种表面物体,包括金属块和金属球、PTFE空心圆柱、木框、棱柱形金属笔、玻璃杯和玻璃球、金属图钉、多孔海绵和鸡蛋。
在爬壁机器人应用中(图6),研究团队设计了三足式爬壁机器人。每个足部包含支撑层、绝缘层、金属导电层和低共熔凝胶层(50×25×2 mm),嵌入镍铬电阻丝实现电热驱动(6 V,2 A,约15秒完成结晶态到熔融态转变)。机器人运动通过中央主足和两侧副足的交替加热-冷却-结晶-脱附实现。电信号实时监测显示:加热时电阻下降、电容上升;接触墙壁时电容显著增加;冷却时电容下降、电阻上升。该机器人在金属壁、木壁、瓷砖壁、石灰壁、粗糙石壁和开裂石灰壁等垂直表面上均能稳定爬行,携带负载超过700 g(机器人本体>500 g + 200 g摄像头),爬行速度约8 cm/min,每个爬行周期能耗约1080 J。
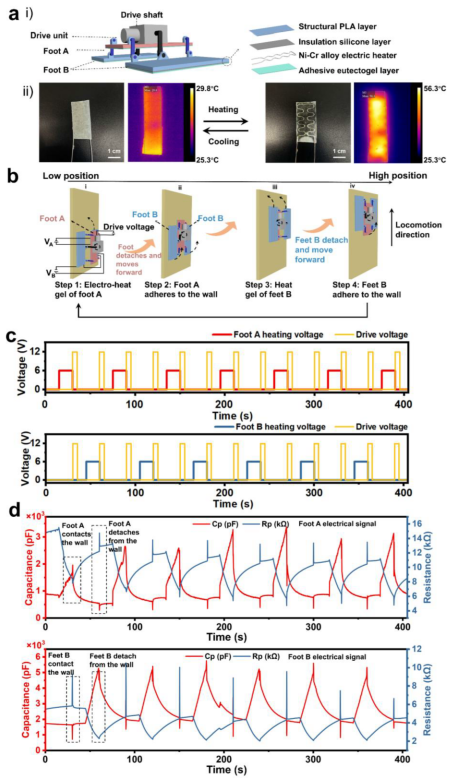
图6 | 爬壁机器人的设计原理与制造。 (a) (i) 三足爬壁机器人的机械设计示意图(左),以及足部布局,包括支撑层(尺寸:130 mm × 50 mm × 5 mm)、绝缘层(尺寸:50 mm × 25 mm × 2 mm)、金属层和低共熔凝胶(EG₀.₆₇₋₃₀)层(尺寸:50 mm × 25 mm × 2 mm)。(ii) 探测嵌入凝胶(EG₀.₆₇₋₃₀)中导电回路的低共熔凝胶加热过程的红外图像。 (b) 爬壁机器人爬行原理示意图。机器人爬行运动通过人工协调控制实现。 (c) 爬壁机器人的足A和足B在加热-粘附-冷却-结晶-加热-剥离过程中的控制信号,包括加热电压(6 V,2 A)和驱动电压(12 V,3 A)。驱动电压用于驱动轴的电机,而加热电压分别施加于足A和足B。 (d) 足A和足B在运动过程中接触和脱离墙壁时的电传感信号变化,指示足部的实时状态。
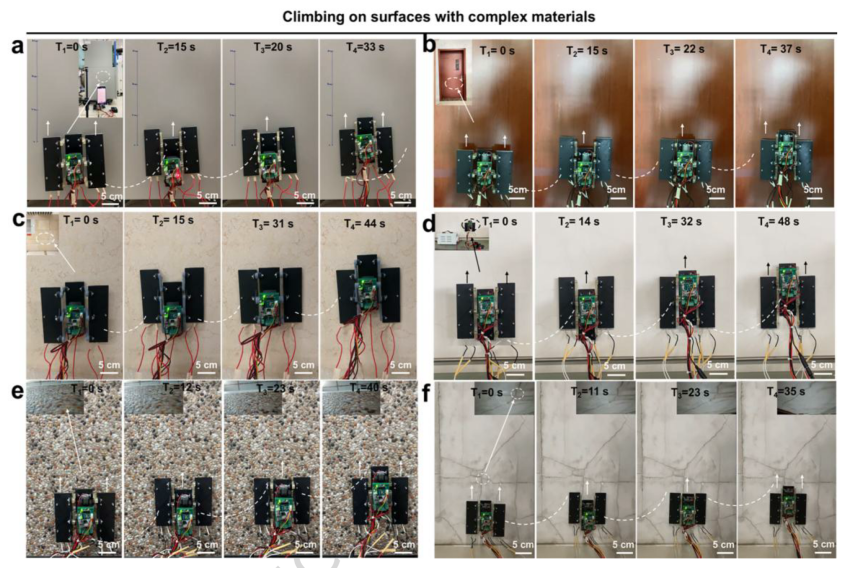
图7 | 使用低共熔凝胶EG₀.₆₇₋₃₀的机器人在各种材料和粗糙度表面上的爬行。 (a) 机器人在金属壁上爬行。 (b) 机器人在木壁上爬行。 (c) 机器人在瓷砖壁上爬行。 (d) 机器人在石灰壁上爬行。 (e) 机器人在粗糙石壁上携带相机进行检测。 (f) 机器人在开裂石灰壁上携带相机进行检测。
总结而言,该研究开发的(电)热可切换低共熔凝胶克服了现有可切换粘附剂的关键局限性。通过可逆结晶-熔融相变,实现了在极其广泛的基底上(无论材质或表面粗糙度)的强力锁固粘附。与传统干粘附剂在非光滑或灰尘表面失效、液体/凝胶粘附剂缺乏机械稳定性不同,该低共熔凝胶在粗糙多孔或纹理表面上实现了高达1700 kPa的粘附强度。“锁固”机制使其能够适应多样界面,连接了软体机器人与重载工业抓取器之间的鸿沟。高强粘附与实时远程监测(通过电导/电容传感)的协同提供了闭环反馈机制。未来工作将聚焦于优化切换速度和极端环境下的长期耐久性,推动其在下一代软体机器人和自动化制造中的应用。
PAPER INFORMATION

快速预审、投刊前指导、专业学术评审,对文章进行评价

校对编辑、深度润色,让稿 件符合学术规范,格式体例等标准
.png)
适用于语句和结构尚需完善和调整的中文文章,确保稿件达到要求
.png)
数据库包括: 期刊、文书籍、会议、预印章、书、百科全书和摘要等
让作者在期刊选择时避免走弯路,缩短稿件被接收的周期
根据目标期刊格式要求对作者文章进行全面的格式修改和调整
帮助作者将稿件提交至目标期刊投稿系统,降低退稿或拒稿率
按照您提供的稿件内容,指导完成投稿附信(cover letter)







北京总部:北京市海淀区碧桐园 3 号楼 2 层 211 广州办事处:广州市黄埔区科学城国际企业孵化器 E栋306 联系人:客服 / 18163670350
Copyright © 2022-2024 北京特诺科技有限公司 版权所有 备案/许可证编号为: 京 ICP 备 2023007944 号
