
来源:特诺科研
微观机械超材料实现热驱动变革:DNA铰链让胶体结构“自发呼吸”
在生物体内,蛋白质机器能够利用布朗运动产生的热涨落实现精准形变,完成复杂的生物学功能。然而,人造微观机械虽然也能设计特定的形变模式,却因结构过于刚硬而无法被热涨落驱动,通常需要外部强激励才能工作;而那些能够响应热涨落的结构,其形变又往往是不可控的。如何将宏观机械超材料的设计理念带入微观世界,并让其像生物机器一样“柔软”地呼吸,一直是软物质物理与材料科学领域的重大挑战。
近日,荷兰莱顿大学Daniela J. Kraft团队成功构建了一种由热涨落驱动的布朗机械超材料。研究人员利用基于DNA的表面滑动连接技术,创造出一种全新的“胶体枢轴”——刚性的各向异性单元可绕公共粒子自由转动。通过层级组装策略,这些胶体枢轴被进一步构建为具有特定形变模式的“旋转钻石”和“旋转三角形”(也称为kagome)晶格结构。实验定量证明,热涨落能够驱动这些结构产生预期的拉胀变形。更令人瞩目的是,通过在枢轴中引入磁性粒子,研究团队实现了对材料形变的外部磁控,同时仍能利用布朗运动实现精确的形状重构。这一成果为制造可被微小能量驱动的智能微观机器和功能材料开辟了新路径。相关论文以“Pivoting colloidal assemblies exhibit mechanical metamaterial behaviour”为题,发表在Nature上。
研究的起点是设计一种既能刚性连接又能自由转动的微观构件。传统胶体关节虽然灵活,但往往导致不可控变形;而非球形颗粒间的关节又会失去柔性。研究团队巧妙地将表面带有可滑动DNA链接的二氧化硅微球组装成刚性的三角形或菱形团簇,这些团簇围绕一个共享的中心粒子形成“胶体枢轴”(图1b,c)。通过精心设计DNA链接的互补序列,确保了团簇本身的机械刚性,同时保留了团簇绕中心转动的唯一自由度。实验观测显示,三角形枢轴和菱形枢轴的开合角度在热涨落下分别可在-60°至60°和-30°至30°的几何允许范围内自由波动(图1d-f)。这种枢轴的熵弹性刚度约为10 nN/m,比此前最先进的人造铰链软了四个数量级,真正实现了自由铰接。
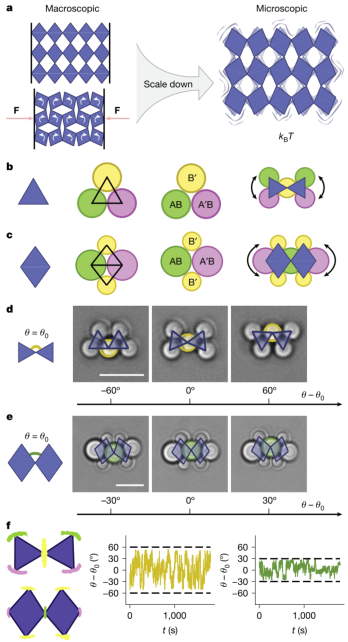
图1 | 热机械超材料的构建单元。 a. 将机械超材料(如旋转钻石晶格)转化到微观尺度,需要构建由铰链键连接的刚性单元,在此尺度下,热涨落而非外力驱动结构变形。b, c. 我们通过在钻石的每个角上放置胶体关节,实验实现了铰接的三角形(b)和菱形(c)单元。使用两种尺寸的胶体球和两对表面可移动的DNA连接子(用A-A'和B-B'表示),以确保单元的机械刚性,同时允许铰链运动。d, e. 明场显微镜快照显示,成对的铰接三角形(d)和菱形(e)单元的相对开合角存在随机涨落。f. 通过定量图像分析,我们提取了所有粒子相对于质心随时间的位置(左)以及开合角的随机变化,该变化在几何允许范围内波动(虚线)。比例尺,5 μm。
研究团队首先将这种机制应用于构建经典的“旋转钻石”晶格(图2a,b)。他们通过层级组装获得了不同大小的钻石结构单元(图2c)。实验发现,这些微观结构仅沿单一的“反向旋转”软模发生涨落(图2c-f),其熵刚度远低于其他需要拉伸或压缩键的模式(图2g)。这种单一软模的主导地位产生了特征性的团簇反向旋转和孔洞的棋盘格图案。内部角度的相关性分析完美地展示了预期中的拉胀行为所需的(反)相关性(图2h-j)。这证明微观旋转钻石结构形成了由热涨落激活的膨胀型超材料。
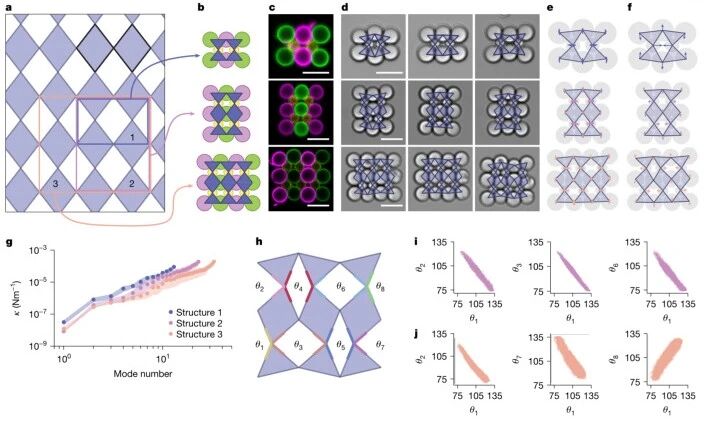
图2 | 胶体机制:旋转钻石结构。 a. 旋转钻石晶格,铰链单元用黑色标示。b. 晶格的不同子集被转化到胶体铰链系统。c. 共聚焦图像显示实验实现,不同颜色表示不同的连接子组合。d. 明场显微镜快照显示通过热涨落实现的结构柔性,中间列为未变形状态,左右两列分别为沿模式相反方向变化的示例。e. 提取的随时间变化的位置(已校正全局旋转和平移),用于模式分析。f. 所有三个结构都有一个单一的软模,即刚性单元的反向旋转。g. 模式谱显示,该模式的刚度比第二软的模式小一个数量级。h-j. 不同开合角的相关性显示出优异的正相关和反相关,如结构2(i)和3(j)所示,证明了拉胀行为所预期的反向旋转运动。g中的阴影区域代表标准差。比例尺,5 μm。
为了获得更大的运动范围和多种重构可能性,研究团队转向了经典的“旋转三角形”(kagome)晶格。他们构建了包含一到三个连接环的kagome子结构(图3a-d),观察到由热涨落驱动的大幅开合运动(图3e)。定量分析表明,最小的kagome结构就拥有三个软模,包括理想旋转三角形结构的拉胀变形模式(图3g)。随着结构扩大,软模数量按预期增加(图3h)。通过测量回旋半径R_g,他们发现结构最常处于中间状态,即熵最大的状态(图3i,j)。即使在包含39个粒子的六环大型结构(存在缺陷键)中,观察到的变形也与理想kagome晶格的预测高度吻合(图3k-m),证明了该策略的可扩展性。
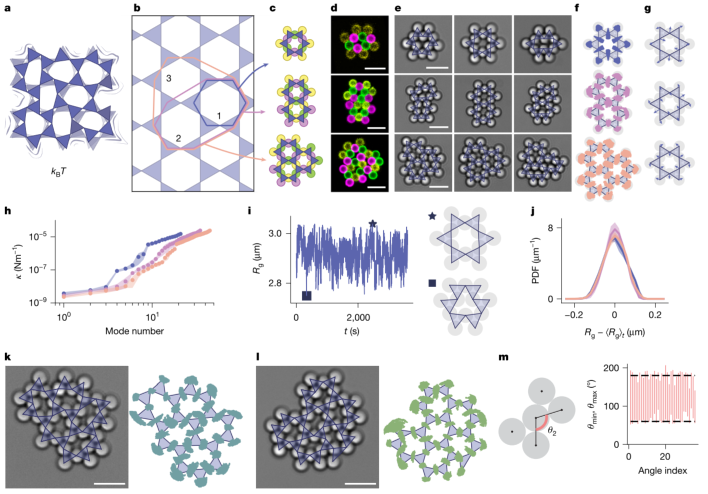
图3 | 热驱动的旋转三角形结构。 a. 柔性kagome晶格的示意图。b, c. 选择kagome晶格的子集转化到胶体铰链系统,如c中示意。d, e. 共聚焦显微镜图像显示实验实现(d;不同粒子功能化由颜色和荧光染料标示)和明场显微镜快照显示热涨落带来的结构柔性(e)。f. 用于模式分析的、减去整体平移和旋转后的粒子位置。g. 最小结构的最软的三个模式。h. 模式谱。i. 最小结构的回旋半径Rg时间序列,标出了Rg最大和最小处的构象。j. 来自i的回旋半径 Rg(t)相对于其时间平均值 ⟨Rg(t)⟩的直方图。k, l. 具有五个(k)和六个(l)环的kagome结构的明场显微镜快照和粒子轨迹。m. 六环kagome结构的观测开合角范围。h和j中的阴影区域代表标准差。比例尺,5 μm。
为了实现功能性控制,研究团队将磁性胶体粒子整合进kagome环中(图4a)。在快速旋转的磁场下,磁性粒子相互吸引,促使环结构折叠成两种特定构型之一(图4b-d)。为了仅沿拉胀模式变形,他们在结构中只放置了三个磁性粒子(图4e,f)。开启磁场时,磁性粒子被向内拉拽,选择性地驱动拉胀变形模式,回旋半径减小;关闭磁场后,热涨落又使结构展开(图4f,g)。这展示了可由外部控制、并利用布朗运动恢复的可逆形变。
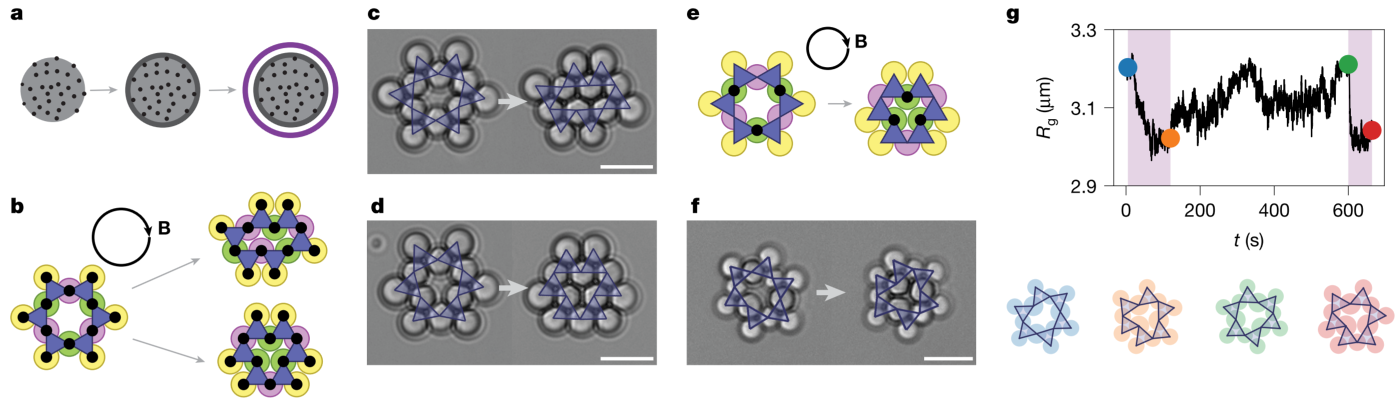
图4 | 通过磁驱动实现可控变形。 a. 为了制造磁响应的胶体kagome结构,含有超顺磁氧化铁纳米颗粒的胶体球被包覆二氧化硅,并用脂质和DNA连接子功能化。b-d. 在快速旋转的磁场(10 Hz)中,磁性胶体球相互吸引,从而以两种方式之一压缩kagome环,如明场显微镜实验观察所示(c, d)。e, f. 当只有三个粒子具有磁响应(用绿色标示)时,它们会纯粹沿拉胀模式压缩,如示意图(e)和实验实现(f)所示。g. 当磁场开启时(紫色阴影),随着结构沿模式折叠,回旋半径 Rg减小。当磁场关闭时,热涨落使结构再次展开。下方展示了所示时间点的构象。比例尺,5 μm。
这项研究证明,通过胶体枢轴将宏观机械超材料设计微型化是可行的。这些材料对热涨落和磁场的可控响应,为设计具有靶向形变的胶体材料提供了巨大潜力,也为研究柔性结构中的热效应提供了理想的定量模型系统。未来,通过自组装等工艺的进一步优化,有望实现更大规模、更复杂的布朗机械超材料,甚至可能创造出能在微观环境中自主工作的软体机器人。
专注期刊投稿、发表十年,任何投稿、写作难题欢迎咨询!

PAPER INFORMATION

快速预审、投刊前指导、专业学术评审,对文章进行评价

校对编辑、深度润色,让稿 件符合学术规范,格式体例等标准
.png)
适用于语句和结构尚需完善和调整的中文文章,确保稿件达到要求
.png)
数据库包括: 期刊、文书籍、会议、预印章、书、百科全书和摘要等
让作者在期刊选择时避免走弯路,缩短稿件被接收的周期
根据目标期刊格式要求对作者文章进行全面的格式修改和调整
帮助作者将稿件提交至目标期刊投稿系统,降低退稿或拒稿率
按照您提供的稿件内容,指导完成投稿附信(cover letter)







北京总部:北京市海淀区碧桐园 3 号楼 2 层 211 广州办事处:广州市黄埔区科学城国际企业孵化器 E栋306 联系人:客服 / 18163670350
Copyright © 2022-2024 北京特诺科技有限公司 版权所有 备案/许可证编号为: 京 ICP 备 2023007944 号
